Python Opencv輪廓常用操作代碼實例解析
1.顏色空間轉換
使用cv2.cvtColor(input_image ,flag),flag為轉換類型
常用的轉換類型有:
BGR和灰度圖的轉換使用 cv2.COLOR_BGR2GRAY BGR和HSV的轉換使用 cv2.COLOR_BGR2HSVimg_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
2.二值化
ret, dst = cv2.threshold(src, thresh, maxval, type) src:表示的是圖片源(灰度圖) thresh:表示的是閾值(起始值) maxval:表示的是最大值 type:表示的是這里劃分的時候使用的是什么類型的算法,常用值為0(cv2.THRESH_BINARY)返回值
ret:指定的thresh
dst: 目標圖像
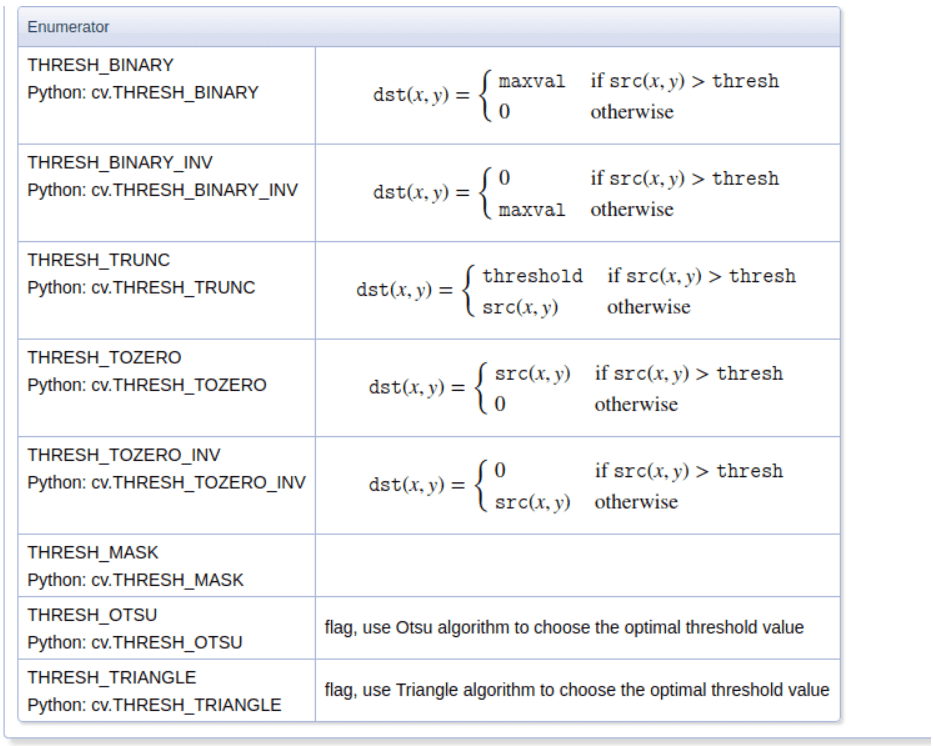
ret, dst = cv2.threshold(img_gray, 200, 255, cv2.THRESH_BINARY)
3.查找并繪制輪廓
3.1 cv2.findContours(image, mode, method[, offset])
概述:
尋找一個二值圖像的輪廓。注意黑色表示背景,白色表示物體,即在黑色背景里尋找白色物體的輪廓
參數:
image: 8位單通道圖像。非零像素值視為1,所以圖像視作二值圖像 mode: 輪廓檢索的方式 cv2.RETR_EXTERNAL: 只檢索外部輪廓 cv2.RETR_LIST: 檢測所有輪廓且不建立層次結構 cv2.RETR_CCOMP: 檢測所有輪廓,建立兩級層次結構。上面的一層為外邊界,里面的一層為內孔的邊界信息。如果內孔內還有一個連通物體,這個物體的邊界也在頂層。 cv2.RETR_TREE: 檢測所有輪廓,建立完整的層次結構 method: 輪廓近似的方法 cv2.CHAIN_APPROX_NONE: 存儲所有的輪廓點 cv2.CHAIN_APPROX_SIMPLE: 壓縮水平,垂直和對角線段,只留下端點。 例如矩形輪廓可以用4個點編碼 cv2.CHAIN_APPROX_TC89_L1,cv2.CHAIN_APPROX_TC89_KCOS:使用Teh-Chini chain近似算法 offset:(可選參數)輪廓點的偏移量,格式為tuple,如(-10,10)表示輪廓點沿X負方向偏移10個像素點,沿Y正方向偏移10個像素點返回值:
contours: 輪廓點。列表格式,每一個元素為一個3維數組(其形狀為(n,1,2),其中n表示輪廓點個數,2表示像素點坐標),表示一個輪廓 hierarchy: 輪廓間的層次關系,為三維數組,形狀為(1,n,4),其中n表示輪廓總個數,4指的是用4個數表示各輪廓間的相互關系。第一個數表示同級輪廓的下一個輪廓編號,第二個數表示同級輪廓的上一個輪廓的編號,第三個數表示該輪廓下一級輪廓的編號,第四個數表示該輪廓的上一級輪廓的編號補充: 若想得到輪廓點的集合的列表,可使用
cnt = np.squeeze(contours[0])
3.2 cv2.drawContours(image, contours, contourIdx, color[, thickness[, lineType[, hierarchy[, maxLevel[, offset]]]])
參數:
image: 需要繪制輪廓的目標圖像,注意會改變原圖 contours: 輪廓點,上述函數cv2.findContours()的第一個返回值 contourIdx: 輪廓的索引,表示繪制第幾個輪廓,-1表示繪制所有的輪廓 color: 繪制輪廓的顏色 thickness:(可選參數)輪廓線的寬度,-1表示填充 lineType:(可選參數)輪廓線型,包括cv2.LINE_4,cv2.LINE_8(默認),cv2.LINE_AA,分別表示4鄰域線,8領域線,抗鋸齒線(可以更好地顯示曲線) hierarchy:(可選參數)層級結構,上述函數cv2.findContours()的第二個返回值,配合maxLevel參數使用 maxLevel:(可選參數)等于0表示只繪制指定的輪廓,等于1表示繪制指定輪廓及其下一級子輪廓,等于2表示繪制指定輪廓及其所有子輪廓 offset:(可選參數)輪廓點的偏移量import cv2img = cv2.imread(’D:/2.jpg’,1)
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)ret, dst = cv2.threshold(img_gray, 200, 255, cv2.THRESH_BINARY)
contours,hierarchy = cv2.findContours(dst, cv2.RETR_LIST, cv2.CHAIN_APPROX_NONE)cv2.drawContours(img, contours, -1, (0, 255, 0), 3)
cv2.imshow(’img’,img)cv2.waitKey(0)
4.點與輪廓位置關系
此功能可查找圖像中的點與輪廓之間的最短距離。當點在輪廓外時返回負值,當點在內部時返回正值,如果點在輪廓上則返回零
dist = cv2.pointPolygonTest(cnt, (100, 100), True)
檢查(100,100)與輪廓(cnt)的距離
在函數中,第二個參數需要tuple類型;第三個參數是measureDist。 如果為True,則查找距離. 如果為False,則查找該點是在內部還是外部或在輪廓上(它分別返回+1,-1,0)
如果不需要到距離,請確保第三個參數為False,因為這是一個耗時的過程。因此,將其設為False可提供2-3倍的加速
5.直線擬合fitline函數
output = cv2.fitLine(InputArray points, distType, param, reps, aeps)
參數:
InputArray Points: 待擬合的直線的集合,必須是矩陣形式(如numpy.array) distType: 距離類型。fitline為距離最小化函數,擬合直線時,要使輸入點到擬合直線的距離和最小化。這里的距離的類型有以下幾種: cv2.DIST_USER : User defined distance cv2.DIST_L1: distance = |x1-x2| + |y1-y2| cv2.DIST_L2: 歐式距離,此時與最小二乘法相同 cv2.DIST_C: distance = max(|x1-x2|,|y1-y2|) cv2.DIST_L12: L1-L2 metric: distance = 2(sqrt(1+x*x/2) - 1)) cv2.DIST_FAIR cv2.DIST_WELSCH cv2.DIST_HUBER param: 距離參數,跟所選的距離類型有關,值可以設置為0 reps,aeps: 第5/6個參數用于表示擬合直線所需要的徑向和角度精度,通常情況下兩個值均被設定為1e-2返回值:
output:對于二維直線,輸出output為4維,前兩維代表擬合出的直線的方向,后兩位代表直線上的一點。(即通常說的點斜式直線)
loc = np.array(loc)output = cv2.fitLine(loc, cv2.DIST_L2, 0, 0.01, 0.01)k = output[1] / output[0]b = output[3] - k * output[2]#k[key]報錯?
以上就是本文的全部內容,希望對大家的學習有所幫助,也希望大家多多支持好吧啦網。
相關文章:
 網公網安備
網公網安備